
产品中心 Products
PRODUCTS
产品分类 产品中心
>
产品中心
> 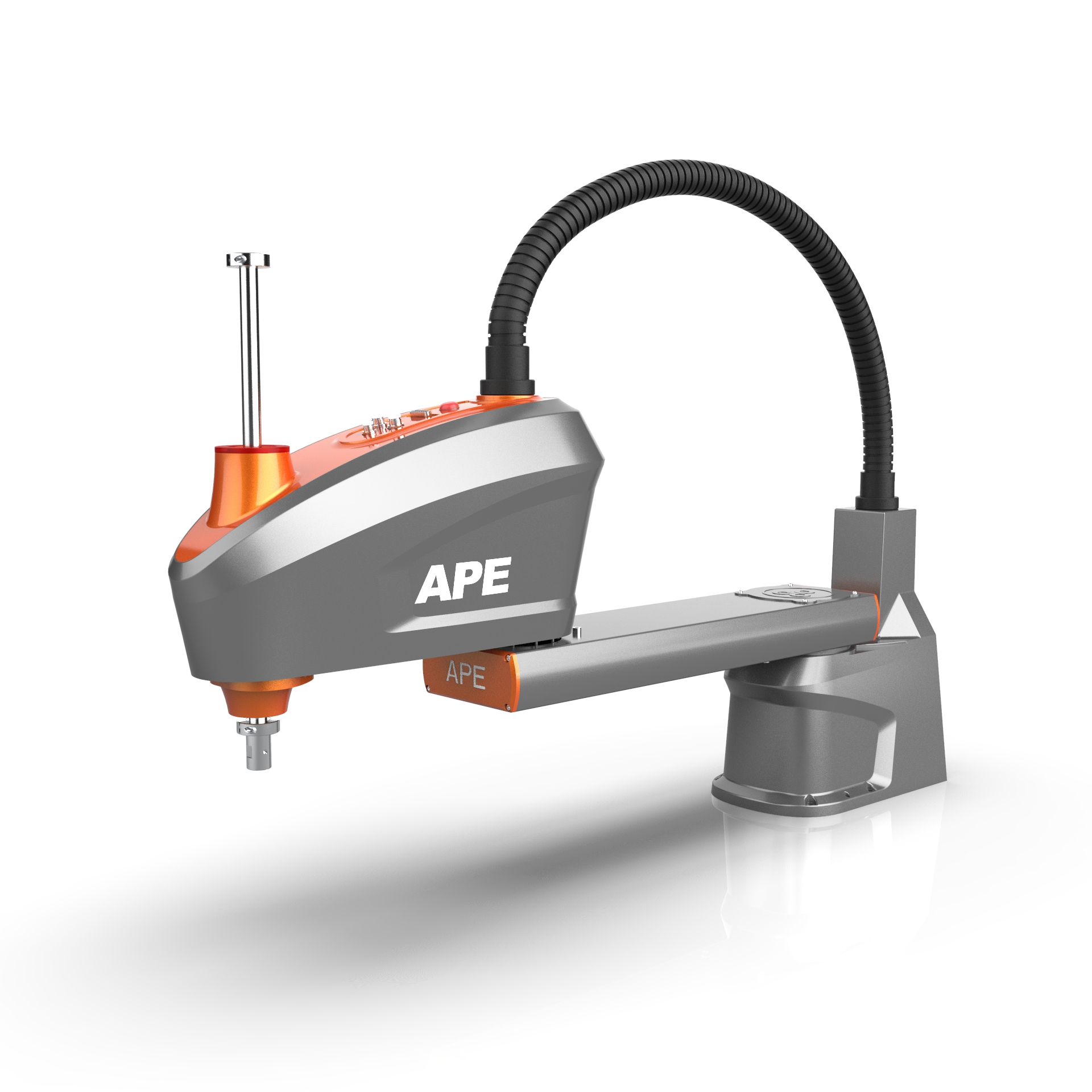
水平多关节机器人汇聚了APE公司先进技术,可以以高速度、高精度、高效率进行立体搬运、挑选、插入、排列、涂胶、装配等工作。 优秀的产品设计、高效的控制系统、便捷的人机交互,令生产效率大幅度提升。

高刚性低惯性小包络:通过机械手臂体拓扑优化,实现了高刚性低惯性臂体;采用水平布线的方式,极大降低了机械手包络空间,方便客户系统布局及使用;

造型美观:机械手本体采用无螺钉的设计理念,配合精美的流线造型,塑造工业艺术品;

选型覆盖面广:400mm与600mm 臂展两款主打产品,并可选择300mm、500mm、700mm、800mm、1000mm等范围,支持定制。
| 形式 | ST6-4070(ST70) | |
| 安装方式 | 桌面 | |
| 构型 | 水平多关节型 | |
| 动作自由度 | 4 | |
| 驱动电机 | 交流伺服电机 | |
| 负载 | 额定质量 | 2Kg |
| 最大质量 | 6Kg | |
| Joint#3最大下压力 | 150N | |
| 各运动轴功率 | Joint#1 | 400W |
| Joint#2 | 200W | |
| Joint#3 | 100W | |
| Joint#4 | 100W | |
| 第四关节容许 惯量力矩 | 额定惯量 | 0.011Kg.㎡ |
| 最大惯量 | 0.13Kg.㎡ | |
| 手臂长度 | 大臂 | 425mm |
| 二臂 | 275mm | |
| 最大可达半径 | 700mm | |
| 工作空间 | Joint#1 | ±122° |
| Joint#2 | ±145° | |
| Joint#3 | 200mm | |
| Joint#4 | ±720° | |
| 最大速度 | Joint#1 + Joint#2 | 7400 mm/s |
| Joint#3 | 925 mm/s | |
| Joint#4 | 1875 °/s | |
| 标准循环时间 | 0.399s | |
| 重复定位精度 | Joint#1 + Joint#2 | ±0.02mm |
| Joint#3 | ±0.01mm | |
| Joint#4 | ±0.01° | |
| 本体重量(不包括线缆) | 25Kg | |
| 用户电路 | 15 Pin D-sub | |
| 用户气路 | ф4mmx1,ф6mmx2 | |
| 环境规格 | IP20 | |
CAD-3D资料下载 | CAD&3D | 服务中心→下载中心 |

 资料下载
资料下载
